
ADAM-6022
Bộ điều khiển PID vòng lặp kép (dual-loop) Ethernet-based
Bộ điều khiển PID vòng lặp kép (dual-loop) Ethernet-based

- Các thuật toán điều khiển PID 2 vòng được tích hợp trong một gói
- 3 đầu vào analog / 1 đầu ra analog / 1 đầu vào digital / 1 đầu ra cảnh báo digital cho 1 vòng lặp PID
- Hỗ trợ nhiều phạm vi I/O analog: 0 ~ 10 VDC, 0 ~ 20 mA và 4 ~ 20 mA
- Hỗ trợ chế độ hành động sưởi / làm mát (trực tiếp / đảo ngược)
- Hỗ trợ mở / đóng vòng lặp (tắt / bật PID) và các chế độ điều khiển thủ công đầu ra analog
- Watchdog timer tích hợp
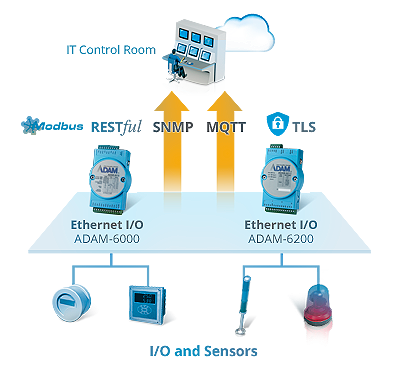
Advantech ADAM-6022 là bộ điều khiển PID vòng lặp kép hỗ trợ Ethernet (ethernet-enabled dual-loop) cho các ứng dụng điều khiển PID có mục đích chung. Một phần mềm tiện ích thân thiện với người dùng được bao gồm để người dùng đặt các tham số PID (Pv, Mv, & Sv). Thông qua trang web tích hợp, người dùng có thể theo dõi và thay đổi điểm đặt điều khiển thông qua Internet thông qua trình duyệt web. ADAM-6022 cũng hỗ trợ giao thức MODBUS/TCP. Phần mềm HMI có thể dễ dàng truy cập mô-đun này để theo dõi dữ liệu I/O và thay đổi các tham số điều khiển.
Tổng quan
Vòng lặp số 2 (3 AI, 1 AO, 1 DI, 1 DO cho mỗi vòng điều khiển)
Đầu vào analog
Kênh 6 (khác biệt)
Phạm vi đầu vào ±10 VDC, 0 ~ 20 mA, 4 ~ 20 mA
Đầu ra analog
Kênh 2
Loại đầu ra V, mA
Phạm vi đầu ra 0 ~ 10 VDC, 4 ~ 20 mA, 0 ~ 20 mA
Đầu vào kỹ thuật số
Kênh 2
Mức logic tiếp xúc khô 0: gần với GND
Mức logic 1: mở
Mức logic tiếp xúc ướt 0: 0 ~ 3 VDC
Mức logic 1: 10 ~ 30 VDC
Đầu ra kỹ thuật số
Kênh 2, bộ thu mở đến 30 V, tối đa 100 mA. trọng tải
Tản điện 300 mW cho mỗi mô-đun
Thông số kỹ thuật chung
Chứng nhận CE, FCC, UL
LAN 10/100Base-T(X)
Công suất tiêu thụ 4 W @ 24 VDC
Đầu nối 1 x RJ-45 (LAN), vít cắm
khối đầu cuối (I/O và nguồn)
Hệ thống giám sát (1,6 giây)
và Truyền thông
(có thể lập trình)
Nguồn vào 10 ~ 30 VDC
Hỗ trợ Modbus/TCP, TCP/IP, UDP, RESTful
(phiên bản D), MQTT (phiên bản D), SNMP (phiên bản D)
Bảng dữ liệu (PDF) Tài liệu & Tải xuống
| Thương Hiệu | Advantech |
|---|
Hãy là người đầu tiên nhận xét “ADAM-6022”




Đánh giá
Chưa có đánh giá nào.